Figure 3.11)
Click to enlarge
Non-URT generally means BB on the front triangle. These bikes dominate the industry these days and most are either mono-pivots or 4-bars. Here we examine pedaling of non-URTs, asking specifically, Are there any relative merits between the mono-pivot and 4-bar design concepts under pedaling, and if so, what are the considerations involved? In asking this fundamental and rather popular question, we will get a good general idea of what attributes really effect non-URT pedaling performance.
We observed in Figure 3.5) of the Forces Between Linearly Constrained Particles. section that the component path tangents determine how any suspension will perform at any point in time.
This means that, neglecting friction in the mechanism, each particular geometry will have its maximum effectiveness only in certain ideal gears (from a practical standpoint, this could mean one gear or several). Any others sets of gears will produce different forces on the mechanism, leading to different components of force along the tangents. The further the gearing from ideal, the more reactive any suspension geometry will be.
For a given deviation away from ideal gearing, suspension rate (spring stiffening) will determine the amount of reaction from a pedal stroke. Shorter travel suspensions tend to be less reactive to pedaling then longer travel versions, since short travel designs should have higher more rising rates (in part due to the fact that many use air shocks these days). In practice, the actual rates in the shallow regions of travel where pedaling will be affected will largely be a function of the total travel length of the rear wheel path.
Most frames mate well with their stock shocks, and all common suspension types can achieve the really useful rates (linear or rising). So rate is only a real issue for those wishing to swap different coil and air shocks in and out of a given frame.
Since rate in the shallow regions of travel will largely be a function of total wheel path length and is of secondary importance to most people, we will not further consider rate here. We refer those still interested, to the Suspension Rate. section in chapter II.
Any comment on frame performance must be made with respect to a range of forks, just as is the case with rider mass. So an assumption must be made for fork characteristics. In addition, dual suspension bottom brackets (BBs) are almost universally 13" ± .5" from the ground without rider, given a typical assumption for the fork Crown to Axle Length or CAL. Thus, the rear wheel and BB largely determine the frame orientation to the ground. So, after noting the required fork assumption, we can neglect the front wheel without much problem. [If one is uncomfortable with this, then one may certainly consider the front wheel axle path. This and the rear axle path will determine orientation of the main triangle to the ground (again, a CAL assumption must be made)].
We see then that the pedaling performance of any non-URT will be determined largely by the rear axle path (including the length, which will give us a good idea of the rate influence).
So PA can become very simplified for certain types of frames and certain types of analyses. This simplified version of PA has been known for some time and been used by numerous designers in the past.
Given that any sort of design can produce all possible rear axle tangents, potential differences between the two non-URT types, and between the various individual non-URT designs in general, will have to come from differing possibilities as the rear axles move through their paths. So we now examine whether or not viable varying curvature, tight curvature, and/or wide curvature offer significant performance advantages or drawbacks.
First, let us consider what might be an ideal path to minimize suspension reaction to pedaling.
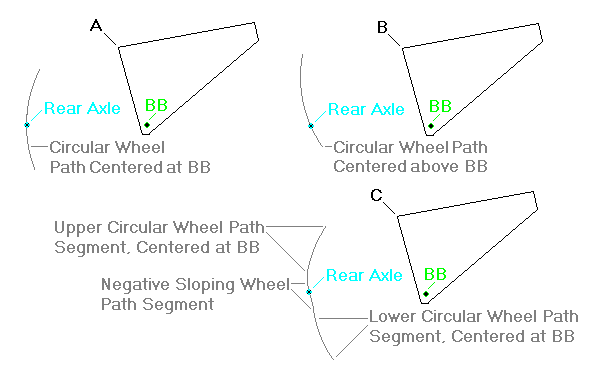
For ease of discussion, we will assume 1-1 gearing. With this gearing, there will be no feedback to the pedals as the suspension goes through its travel, if we have a circular path centered at the BB. That is, the distance from the BB to the rear axle must be constant, as in a mono-pivot with main pivot coaxial to the BB. (If the gearing is larger, then the distance must increase to eliminate feedback, while the opposite is true for smaller gearing.) Figure 3.11 A) shows this wheel path:
Figure 3.11)
Click to enlarge
Continuing with 1-1: To counter squat and some compressive chain effect at equilibrium, the path tangent must have a negative slope (be tilted back counterclockwise from vertical). This will counter squat with chain force and by altering the effect of bike acceleration on the swing arm. Figure 3.11 B) shows this situation, retaining the overall circular wheel path. But now we have a situation with some bump feedback to the pedals.
The significance of feedback is very debated. It certainly achieves its greatest significance away from ideal gearing, usually in the smaller gears where chain-length growth (between the two cogs) is increased and the effect of smooth wheel spin disruption on the crank will be magnified by a large reverse gearing. However, we want to be very clear on one point. There is no free lunch to any degree that you have anti-squat, you will also have some degree of bump feedback, regardless of what certain manufacturers claim.
The vast majority of experienced riders give great importance to a smooth pedal stroke, so feedback is generally seen as something to be minimized if possible. Figure 3.11 C) shows a type of path that would allow the chain to counter squat at equilibrium, while limiting bump feedback to the pedals. This path would have a small segment around equilibrium of just the right negative slope, with BB centered circular segments above and below. Most would consider this the ideal situation.
In principle, a 4-bar can also achieve a path similar to the stated ideal by having a progressively tightening curvature as the suspension compresses through its travel. The subtle features of the Figure 3.11 C) path would be lost, but the broader shape would not be grossly different. This would allow the suspension to control squat at equilibrium, while providing less feedback then a conventional radius circular path, both above and below (below being a lesser issue, since most of the travel is above).
So we see that certain variable curvature paths can offer an advantage with regard to pedaling, in principle.
The Virtual Pivot Point (VPP). design concepts are capable of producing an S-shaped path somewhat similar to the region around equilibrium for the path in Figure 3.11 C). These designs would obviously also be capable of producing tightening curvature paths. To date, the Outland designs are the only bikes we know of claiming significantly varying curvature. Again, unfortunately, the current examples do not take any real advantage of these possibilities.
A tightly curved circular path above equilibrium can provide an anti-squat path tangent, while curving up more sharply to reduce feedback during compression deep into travel. Such a design should be run with little or no sag, since kick-forward during suspension extension may become an issue. The Giant NRS, the The Rocky Mountain ETS-X70, the Cannondale Scalpel, and the split-pivot mono described above (not in production) are examples of tight curvature designs (though one might find that the ETS-X70 does not have a small enough radius, nor the Scalpel enough travel for this to be significant for him or her).
Wide paths would offer no advantages with regard to pedaling, since they offer no special path tangents and do not address the issue of anti-squat verses feedback.
There may be those who desire anti-squat throughout the travel and consider feedback an acceptable price to pay. For these people, wide curves may offer a perceived advantage under pedaling. However, we feel that this is not a wise position. During large compressions from an obstacle, such as a rock, the rider will be kicked forward when the rear tire encounters the obstacle; so squat is not the issue during this type of suspension compression. The impact of a drop-off will compress the suspension regardless and the rider is likely to be standing (thus creating a completely different pedaling situation from that for which any bike will be designed), so again, squat is not an issue.